Учебный курс. Опрос кнопок. Подключение кнопки к AVR Программирование микроконтроллеров с кнопкой и светодиодом
На первом уроке мы научились подавать напряжение ножкой микроконтроллера. Теперь нужно научиться управлять микроконтроллером без перепрошивки.
Зачем это нужно? Например, вы сделали часы на микроконтроллере, нужно выставить время, но очень не удобно каждый раз перепрошивать, когда собьется время. Намного удобнее пользоваться кнопками, например, одной менять часы, другой минуты.
Помните в первом уроке мы настраивали ножку как выход, т.е. мы могли ей подавать напряжение. Так вот, ножку можно настроить как вход. В таком режиме можно проверить есть ли на ней напряжение или нет.
Пример: создаем проект при помощи мастера проектов. Первую ногу настраиваем как выход, вторую как вход. При создании мастером проектов указываем, что ножка PB1 будет входом, на ней же включаем подтягивающий резистор, реализуется это так:

После создания проекта приведем код к такому виду:
| #include |
#include
Как мы видим, по сравнению с первым уроком изменилась настройка порта
if(PINB.1==0) {}
данную строчку нужно читать так — если на ножке 1 порта В подключили землю (0 потенциал), то выполнить код в фигурных скобках. В нашем примере это код из первого урока. Если кнопка не замкнута, то ничего не делать. Промоделировать можно в Proteuse.
Вместо кнопки можно поставить датчик, реле и т.п., вместо светодиода — пищалку, получится сигнализация.
Архив с прошивкой и файлом протеуса доступен
Update1: Зачем нужна подтяжка порта?
У входа мк большое сопротивление, если будут течь даже микротоки вызванные помехами, то по закону Ома U=R*I это может привести к тому, что на входе появится лог 1. Чтобы не было таких проблем в AVR микроконтроллерах можно подключить ножку к плюсу питания, через подтягивающий резистор. В этом случае даже, логика работы меняется наоборот — но если появится помеха, нам это не важно, ведь у нас на входе уже логическая единица.
Почему подключение через резистор? Допустим мы подключили вход к плюсу напрямую без резистора. Когда кнопка сработает, она притянет вход к земле, поэтому на входе будет короткое замыкание между + и землей. Если же стоит резистор, то при замыкании кнопки с одной стороны он так и останется подключен к +, а со второй стороны на нем появится земля от кнопки. Через резистор потечет ток, но его величина будет не такой большой.
Update2: Добавлен тест, в котором вы можете проверить на сколько хорошо вы усвоили материал урока
This movie requires Flash Player 9
Описан простой эксперимент с подключением кнопки к AVR микроконтроллеру, разобрана не сложная программа на языке Си для обработки нажатий кнопки. Разберемся с особенностями подключения кнопки к портам МК, а также с методами считывания состояний кнопки на языке Си.
В предыдущих статьях были рассмотрены эксперименты со светодиодами, которые подключались к портам микроконтроллера, сконфигурированных на вывод (Output).
В этой статье мы подключим к микроконтроллеру кнопку, контакты которой при нажатии замыкаются, а при отжатии - размыкаются (замыкающая кнопка).
Принципиальная схема эксперимента
Для того чтобы можно было хоть как-то наблюдать и управлять чем-то с помощью кнопки мы подключим к микроконтроллеру еще два светодиода. Схемка очень простая, вот она:
Рис. 1. Принципиальная схема эксперимента с микроконтроллером ATtiny2313 и кнопкой.
Как видим, к двум портам PB0 и PB1 через ограничивающие резисторы подключены два светодиода, а к порту PD2 - кнопка и она также с ограничивающим резистором. Для подключения программатора к МК используется разъем Conn 1 (AVR-ISP), а для подключения схемы к отдельному источнику питания +5В предназначены два контакта - P1 и P2.

Рис. 2. Собранная на беспаечной макетной панели схема эксперимента с микроконтроллером и кнопкой.
Важно заметить что для безопасного использования порта с кнопкой, последовательно ей подключен резистор с сопротивлением на 1 КОм (можно подключить и на другое сопротивление 600 Ом - 2 КОм). Примите это как правило хорошего тона в работе с пинами, которое обережет порт МК от выхода из строя в случае ошибочной подачи на пин высокого уровня и при замкнутой кнопке.
Структура портов ввода-вывода в AVR микроконтроллерах
Пины микроконтроллера являются универсальными GPIO (General Purpose Input Output), к ним можно подключать как исполнительные устройства (индикаторы, силовые ключи), так и разнообразные цифровые датчики (кнопки, переключатели).
Несколько пинов в МК могут быть подключены к АЦП/ЦАП (Аналогово-Цифровой-Преобразователь и наоборот), с их помощью можно выполнять анализ и генерацию аналоговых сигналов. Обычные GPIO не умеют работать с аналоговыми сигналами, у них на входе/выходе может быть только 0 (0В) или 1 (+5В).
К каждому пину GPIO внутри микроконтроллера подключены несколько блоков и электронных компонентов, о которых полезно знать:
- Между пином порта и каждой из шин питания (GND и VCC) подключено по диоду . Они используются для "гашения" кратковременных помех, скачков напряжения относительно пина и каждой из шин питания;
- Также между пином и GND включен конденсатор . Точно не знаю зачем он нужен, возможно для защиты от помех, для предотвращения дребезга контактов при использовании кнопок и переключателей подключенных к пину, или еще для чего-то;
- К каждому пину подключен электронный ключ с резистором - это подтяжка пина к напряжению источника питания (Pull-UP) . Данный электронный ключ включается программно и служит для установки по умолчанию высокого логического уровня 1 (+5В) при работе с пином в режиме ввода (Input);
- Между пином и каждой из шин питания (GND и VCC) включены еще два электронных ключа (без резисторов), они нужны для установки на пине высокого (+5В) или низкого (0В) логического уровня при работе пина в режиме вывода (Output).
Для программного управления и конфигурирования каждого из портов применяются три специальных регистра, к примеру для порта "B":
- DDRB - регистр (8 бит) для установки режимов работы пинов - на ввод или вывод. Осуществляется установкой соответствующих бит в регистре;
- PORTB - регистр для управление состоянием пинов порта в режиме вывода - высокий или низкий уровень. Также используется в режиме ввода, применяется для включения подтягивающих резисторов (Pull-UP) и установки высокого уровня на входе по умолчанию;
- PINB - регистр, который содержит логические состояния пинов в порте, используется для чтения значений портов, которые сконфигурированы в режиме ввода.
Более детально узнать об устройстве портов для конкретной модели микроконтроллера можно из его даташита, в разделе "I/O-Ports", также там могут быть приведены примеры кода на Си и Ассемблере для работы с портами.
Пин RESET в качестве порта ввода-вывода
Полезно знать что пин "RESET" микросхемы (у нас на схеме это пин под номером 1), который предназначен для сброса выполнения программы микроконтроллера (перезагрузки), также можно использовать для подключения кнопок, светодиодов и других устройств ввода-вывода, то есть он может быть превращен в обычный GPIO.
Это может быть полезно если у микросхемы не хватает пинов для вашей конструкции. Например при сборке какого-то устройства на чипе ATtiny13 (8 выводов, 2шт - питание, 5шт - порты ввода-вывода, 1шт -для RESET) у вас оказалось что не хватает одного пина для светодиода. Здесь может быть несколько вариантов решения проблемы:
- Перепрограммирование пина с RESET под порт ввода-вывода;
- Подключение светодиода к одному из соседних уже использованных пинов, применив некоторые хистросты в схемном решении и с учетом возможности его общего использования;
- Использование другого МК у которого больше пинов, например ATtiny2313.
Что из этих вариантов проще и дешевле по финансам/времени - судите по своему случаю.
Для превращения пина "RESET" в порт ввода-вывода придется изменить специальный фьюз - RSTDISBL (Reset Disable). Но прежде чем это сделать нужно помнить что после данной операции перепрограммировать микроконтроллер станет возможным только с применением высоковольтного программатора (на 12В), обычный USB ISP или другой программатор с питанием от 5В сделать свою работу уже не сможет.
Программа на Си
Итак, у нас есть одна кнопка и два светодиода которые подключены к микроконтроллеру, что же с ними можно сделать? - а сделаем мы вот что (алгоритм):
- После включения питания светодиоды будут мигать попеременно и с задержкой в 300 миллисекунд;
- При нажатии и удержании кнопки будет светиться только синий светодиод;
- После отжатия кнопки синий светодиод мигнет 3 раза с задержкой 500 миллисекунд, после чего светодиоды снова будут мигать поочередно и с задержкой 300 миллисекунд.
Пример реализации такого алгоритма на языке Си под AVR приведен ниже. Создадим новый файл для нашей программы и откроем его для редактирования:
Nano /tmp/avr-switch-test.c
Поместим следующий код в тело файла:
/* Эксперимент с кнопкой на ATtiny2313
* https://сайт
*/
#define F_CPU 1000000UL // Частота ядра = 1 МГц
#include
Первым делом мы задаем константу F_CPU , которая укажет компилятору рабочую частоту ядра микроконтроллера, это нужно чтобы некоторые подпрограммы и функции работали корректно. В нашем примере используется функция задержки по времени - "_delay_ms" из библиотеки "util/delay.h", которая просчитывает время затраченное на холостые такты, опираясь на значение в константе F_CPU.
Посмотреть код библиотеки "delay" для организации задержки по времени и в котором используется константа F_CPU, можно в GNU Linux при помощи любого текстового редактора, к примеру можно выполнить вот такую команду:
Nano /usr/lib/avr/include/util/delay.h
Заводская установленная частота внутреннего RC генератора в микроконтроллере ATtiny2313 равняется 8000000Гц (8МГц), также по умолчанию установлен фьюз деления частоты - CKDIV8 (Clock Divide by 8), поэтому реальная рабочая частота кристалла = 8000000Гц / 8 = 1000000Гц = 1МГц.
Посмотреть какие фьюзы установлены в микроконтроллере можно при помощи avrdude или же графической оболочке к нему под названием AVR8 Burn-O-Mat .
Дальше в программе определены макросы для управления состоянием портов к которым подключены светодиоды: LED_BLUE_ON, LED_BLUE_OFF, LED_RED_ON, LED_RED_OFF. Вызвав подобный макрос в любом месте программы мы очень просто можем зажечь или погасить каждый из светодиодов, не придется повторять его код, что в свою очередь упростит программу и сделает ее более наглядной.
В основной программе "void main(void)" мы начинаем работу с конфигурации портов:
- DDRD |= (0 << PD2) - установка разряда PD2 регистра DDRD на ввод, к нему подключена кнопка (пин 6);
- PORTD |= (1 << PD2) - включение подтягивающего резистора для пина к которому привязан разряд PD2 регистра PORTD (пин 6);
- DDRB |= (1 << PB0) - установка разряда PB0 в регистре DDRB на вывод, к нему подключен СИНИЙ светодиод (пин 12);
- DDRB |= (1 << PB1) - установка разряда PB1 в регистре DDRB на вывод, к нему подключен КРАСНЫЙ светодиод (пин 13).
Дальше, используя макросы, мы гасим красный светодиод и зажигаем синий. Теперь при помощи еще одного вечного цикла но у же с условием мы выполним ожидание до того момента, пока кнопка не будет отжата: "while(!(PIND & (1 << PD2)));".
При отжатой кнопке на пине 6 появится высокий уровень (это сделает внутренний подтягивающий резистор, который мы включили раньше), а в разряде PD2 регистра PIND будет установлена логическая 1.
После этого выполняется трехразовое мигание (включение-выключение) синего светодиода с задержкой в 0,5 секунды и основной вечный цикл начинает работу по новому - будут поочередно зажигаться два светодиода.
Очень простая программа, но тем не менее, она является хорошим примером и почвой для дальнейших экспериментов.
Настройка Geany под ATtiny2313
В предыдущих публикациях я проводил эксперименты с микроконтроллером ATMega8, здесь же используется менее "нафаршированный" МК - ATTiny2313.
Для компиляции программы и прошивки ее в МК следует немножко перенастроить команды для сборки в интегрированной среде программирования Geany.
Идем в меню Build - Set Build Commands. В команде для компиляции (C commands) нужно изменить модель применяемого чипа: "-mmcu=attiny2313". В команде для прошивки МК нужно изменить тип чипа для avrdude: "-p t2313".

Рис. 3. Перенастройка Geany для работы с микроконтроллером ATTiny2313.
Все команды приведены для ОС GNU Linux, если у вас Windows то возможно придется прописать полные пути к бинарным файлам "avr-gcc.exe", "avr-objcopy.exe", "avrdude.exe".
Более подробно о том как настроить Geany в GNU Linux я рассматривал в одной из предыдущих статей цикла.
Компиляция и прошивка программы в МК
Компиляцию, сборку и прошивку программы можно выполнить нажав в среде Geany поочередно три кнопки: "Compile", "Build" и "Run". Также все эти операции можно выполнить из консоли, вот команды для данных действий (выполнять последовательно):
Avr-gcc -mmcu=attiny2313 -Os /tmp/avr-switch-test.c -o /tmp/avr-switch-test.o avr-objcopy -j .text -j .data -O ihex /tmp/avr-switch-test.o /tmp/avr-switch-test.hex avrdude -c usbasp -p t2313 -P usb -U flash:w:/tmp/avr-switch-test.hex
Все команды почти полностью (за исключением подстановок имен файлов) идентичны тем, которые мы исправляли в настройках Geany.
Заключение
Несмотря на простоту эксперимента я также постарался осветить некоторые очень важные технические моменты работы с портами, приведенные знания и опыт будут полезны в дальнейшем изучении и работе с микроконтроллерами ATMEL.
В данной статье описано подключение тактовой кнопки к микроконтроллеру семейства AVR. Приведены алгоритмы обработки событий кнопки и программного антидребезга. В качестве примера приведена программа управления светодиодом, написанная в CodeVisionAVR.Аппаратная реализация.
Начнем с того, что кнопку нужно правильно подключить. По правилам построения цифровых устройств, схема подключения должна быть такой
Но устройство AVR контроллеров позволяет упростить схему за счет внутренних ресурсов чипа. В качестве резистора R* можно задействовать встроенный резистор в МК. Правда, это надо будет программно прописать (не забудьте об этом!!!). В конечном варианте схема будет выглядеть вот так:
В схеме так же присутствует кварцевый резонатор с согласующими конденсаторами. Начальный Reset МК так же осуществляется за счет внутренней цепи сброса МК.
Для примера нам потребуется светодиод, подключеный через токоограничивающий резистор 220-330 Ом.
Как видно из схемы, при нажатии кнопки на выходе будет присутствовать низкий логический уровень. А ток через светодиод будет проходить при подаче на выход МК высокого уровня.
Программная реализация.
Простейший случай.
Для того чтобы контроллер мог отслеживать состояние кнопки, он должен в цикле проверять состояние входа. Пусть на линии порта, содержащей кнопку, установлен высокий логический уровень (5В). Тогда при нажатии кнопки (соединении линии порта с землей) линия будет иметь низкий уровень. Это изменение и будет отслеживать наша программа.
Рассмотрим пример, в котором при каждом нажатии на кнопку, светодиод будет менять свое состояние. Для этого организуем цикл.
Алгоритм получился примерно вот такой:
Пояснение: в бесконечном цикле микроконтроллер проверяет состояние своего входа, и в случае обнаружения на нем низкого уровня (замыкание вывода на землю) производит нужные операции.
Дребезг контактов.
Но на практике не все получается так вот красиво и гладко. Все дело в том, что практически не бывает идеальных кнопок. То есть, когда вы нажимаете на кнопку, контакты не сразу занимают нужное положение, перед этим они начинают колебаться, приводя к неоднократному срабатыванию кнопки – это явление называется дребезг контактов. На рисунке показан график того, что примерно происходит на входе контроллера при нажатии кнопки.

Для человека такое время колебания незначительно – мы его даже не заметим. Другое дело, микроконтроллер: предположим, проверка кнопки осуществляется в цикле, а контроллер работает на частоте 8 МГц, в таком случае, проверка кнопки будет осуществляться несколько тысяч, если не десятков тысяч раз в секунду. Может получиться так, (а скорее всего так и получится) что за то время, пока происходит дребезг, программа еще раз проверит кнопку – в таком случае предсказать результат сложно (раз на раз не приходится)
Программный антидребезг
Решить эту проблему можно несколькими путями. В данной статье рассмотрим программный способ. Он заключается в том, что при первом срабатывании кнопки будет вызвана задержка, которой нужно перекрыть время дребезга. После этой задержки будет вновь проверено состояние кнопки. И если там будет ожидаемое значение (например, нажата) то программа выполнит действие по нажатию кнопки.
Алгоритм антидребезга при этом будет выглядеть так:

Важно помнить, что при отпускании кнопки дребезг так же будет происходить!
Ожидание отпускания кнопки.
Предположим, вы нажали кнопку и держите. Программа проверит ее в первый раз – сделает все так, как надо. Обработает антидребезг, выполнит все что нужно. А потом при последующей проверке снова обнаружит, что кнопка нажата – непорядок. Надо сделать так, чтобы программа дождалась отпускания кнопки. Для этого после выполнения нужных от нажатия кнопки действий запускаем цикл, выйти из которого можно будет только при отпущенной кнопке. (Это лишь один из вариантов. он далеко не самый производительный, зато наиболее простой для начинающих) Получается, что пока вы держите кнопку программа не проверяет ее состояние заново. После выхода из этого цикла надо прописать антидребезг (аналогичным образом).
Алгоритм приобретет такой вид:
В плане теории, в общем-то все) Поздравляю, если вы дочитали до этого места!
Пример применения всего вышеописанного.
Как и было заявлено в начале статьи, рассмотрим программу управления светодиодом.
Схема приведена выше.
Алгоритм работы программы следующий:
Реализация данного алгоритма зависит от того, на каком языке вы пишите, и как вы это делаете. В качестве примера привожу реализацию в компиляторе CodeVision AVR
200?"200px":""+(this.scrollHeight+5)+"px");">
/*****************************************************
This program was produced by the
CodeWizardAVR V2.04.0a Evaluation
Automatic Program Generator
© Copyright 1998-2009 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project: Test
Version: 1.0.0.0.1
Date: 20.09.2009
Chip type: ATmega8
Program type: Application
AVR Core Clock frequency: 16,000000 MHz
Memory model: Small
External RAM size: 0
Data Stack size: 256
*****************************************************/
#include
#include
// Declare your global variables here
bit flag = 0;
Void set(){ // функция смены значения на выходе
flag = !flag;
PORTD.4 = flag;
}
void main(void)
{
// Declare your local variables here
// Input/Output Ports initialization
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=P State0=T
PORTB=0x02;
DDRB=0x00;
// Port C initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State6=T State5=T State4=T State3=T State2=P State1=T State0=T
PORTC=0x04;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=Out Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=0 State3=T State2=T State1=T State0=T
PORTD=0x00;
DDRD=0x10;
// Timer/Counter 0 initialization
// Clock value: Timer 0 Stopped
TCCR0=0x00;
TCNT0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer 1 Stopped
// Mode: Normal top=FFFFh
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer 1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x00;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer 2 Stopped
// Mode: Normal top=FFh
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
MCUCR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x00;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
While (1)
{
if (PINC.2==0) { // ждем нажатия
if (PINC.2==0) set(); // если все норм, переключаем
else continue;
}
else continue;
While(PINC.2==0) {}; // ждем отпускания кнопки
delay_ms(50); // антидребезг
};
}
В начале в генераторе кода надо сконфигурировать линии портов. На скриншоте указано, что на линию входа необходимо подключить внутренний нагрузочный резистор (поставить Р вместо Т). Об этом резисторе написано выше. Там, где говорилось о вариантах подключения кнопки к контроллеру.
В предыдущих уроках я рассказывал, как с мк вывести информацию: и . А в этом уроке мы будем вводить информацию при помощи кнопок. Кнопки бывают нескольких видов: фиксирующие и тактовые.Из названия кнопки понятен принцип ее работы: тактовая - нажал, контакты замкнулись, разжал - разомкнулись; фиксирующие фиксируют своё состояние: нажал - замкнулись контакты, еще раз нажал - разомкнулись.
Стандартная схема подключения кнопок очень простая, выглядит так
 Идея работы такова: на ножку через резистор 10к подается напряжение 5 вольт, на ножке логическая единица. Но когда мы нажимаем кнопку, мы ножку замыкаем на землю, а ток-то через резистор потечет маленький, и он будет не в состоянии удержать 5 вольт, и на ножке напряжение просядет до 0 вольт, а это логический 0.Эти моменты мы и будем отлавливать в программе.
Напишем программу, которая будет при нажатии кнопки включать светодиод, при отжатой - выключать
Идея работы такова: на ножку через резистор 10к подается напряжение 5 вольт, на ножке логическая единица. Но когда мы нажимаем кнопку, мы ножку замыкаем на землю, а ток-то через резистор потечет маленький, и он будет не в состоянии удержать 5 вольт, и на ножке напряжение просядет до 0 вольт, а это логический 0.Эти моменты мы и будем отлавливать в программе.
Напишем программу, которая будет при нажатии кнопки включать светодиод, при отжатой - выключать
#include
В большинстве современных микроконтроллеров есть встроенный подтягивающий резистор R1, поэтому внешний можно и не ставить
 Чтобы включить внутренний подтягивающий резистор нужно при инициализации порта в регистре PORTD выставить соответствующий бит, на котором висит кнопка, в единицу: PORTD=0b00000100;
Чтобы включить внутренний подтягивающий резистор нужно при инициализации порта в регистре PORTD выставить соответствующий бит, на котором висит кнопка, в единицу: PORTD=0b00000100;
А что же произойдет, если вывод будет сконфигурирован как выход:
- Если на выводе логический ноль, ничего страшного не случится
- если на выводе вдруг окажется логическая единица, то при нажатии кнопки мы попросту закоротим вывод на землю, и через него потечет ток, который ножка не выдержит (ток через ножку не должен превышать 40 милиампер), и вероятнее всего, она перегорит
 Есть еще много способов как подключить кнопки к микроконтроллеру, например с помощью диодов или с помощью ацп, но я их описывать не буду, так как курс рассчитан для начинающих. Если надо, то найдете сами.
Есть еще много способов как подключить кнопки к микроконтроллеру, например с помощью диодов или с помощью ацп, но я их описывать не буду, так как курс рассчитан для начинающих. Если надо, то найдете сами.
Сегодня мы расширим свой кругозор по изучению работы портов микроконтроллера и изучим второе назначение порта — работу на вход. И для изучения работы на вход мы применим обычную тактовую кнопку.
Как всегда, создадим проект в Atmel Studio, выберем Atmega8A, назовем проект Test04 и код также в main.c, как обычно, скопируем с проекта предыдущего урока.
В качестве подопытного порта давайте возьмём порт B. Можно с успехом использовать любой порт. И в качестве ножки возьмем нулевую ножку. Итак у нас ножка B0.
Также опять мы соберём проект, скопируем и переименуем файл протеуса, откроем его и в свойствах контроллера покажем путь к новому проекту. Запустим на выполнение и убедимся, что всё работает.
Добавим кнопку в протеусе, для этого в поиске компонентов найдём Button
Затем подключим нашу кнопку вот таким вот образом к ножке B0 контроллера

Судя по данной схеме, когда кнопка будет в нажатом состоянии, то Ножка PB0 у нас будет иметь низкий логический уровень, а при отжатом — непонятный уровень, поэтому мы применим подтягивающий к питанию резистор, который можно не паять физически, а подключить опционально определенной командой.
Для этого мы, во-первых настроим порт B. Мы можем объявить все ножки порта B на вход, так как нам не важны настройки остальных ножке, ибо мы их не используем
DDRD = 0xFF;
DDRB = 0x00;
В случае, когда мы работали с портом D на выход, биты регистра PORTD отвечали за уровень на соответствующих ножках. А в случае, когда порт инициализирован на вход, как наш порт B, то биты регистра PORTB будут уже отвечать за подтягивание к соответствующим ножкам порта резисторов на шину питания. Если будет логическая единица, то регистр будет подтягиваться, а если логический ноль — то не будет. Поэтому мы в 0 бите регистра установим 1
PORTD = 0b00000001;
PORTB = 0b00000001;
Соберём код и запустим его в протеусе. Мы видим, что на ножке B0 у нас установилась логическая 1 , а если мы нажмём кнопку, то увидим, что на ней будет логический 0 , о чём свидетельствует синий цвет квадратиков на ножке и на кнопке.
В бесконечном цикле закомментируем весь код. В видеоверсии урока показано, как данную операцию можно выполнить одним движением (выделяем весь текст, который мы хотим закомментировать, затем нажимаем одновременно Shift и обычный слэш (не обратный))
// for(i=0;i<=7;i++)
// {
// PORTD = (1< // _delay_ms(500);
// }
В данном цикле мы и будем отслеживать состояние ножки PB0. Делается это с помощью определения состояния соответствующего бита в регистре PINB, который собственно за это и отвечает. Чтобы нам следить за каким-либо действием или состоянием, нам необходимо будет обработать условие. Условие в языке C добавляется с помощью команды if
. И в качестве условия мы возьмём состояние ножки 0 порта B или состояние бита 0 регистра PINB
.
Как же можно получить состояние одного бита, ведь в языке C в отличие от ассемблера нет битовых операций?
Можно пойти на хитрость и применить вот такую конструкцию PINB
&0b00000001
.
Данная конструкция нам и проверит нулевой бит. То есть если в регистре PINB также будет 1 в нулевом его бите, то независимо от состояния остальных битов в данном регистре мы получим ненулевой результат, что также является истиной. То есть если ни с чем не сравнивать в условии результат, то условие эквивалентно сравниванием с нулём, только наоборот. Для истинности результат должен быть ненулевым — (результат!=0
).
Но нам с вами наоборот нежелательно, чтобы ножка была в высоком логическом состоянии, так как кнопка у нас подключена к общему проводу. Поэтому мы должны поставить отрицание и написать код следующим образом
while
(1)
if
(!(
PINB
&0b00000001))
{
}
else
{
}
Теперь нам необходимо добавить тело условия. При выполнении условия, что кнопка нажата, мы будем зажигать светодиод на ножке D0. А если условие не будет выполняться (кнопка будет отжата), то мы будем его гасить. Также мы погасим данный светодиод и в начале программы. Поэтому получим следующий код
DDRB
=0x00;
PORTD
=0b00000000
;
PORTB
=0b00000001;
while
(1)
If
(!(PINB
&0b00000001))
PORTD
=0b00000001;
Else
PORTD
=0b00000000;
Теперь давайте пересоберём проект и пойдём в протеус смотреть, удалось ли нам что-то. Чтобы у нас при сборке не было даже предупреждений, уберём объявление переменной i, так как она в коде не используется int
main
(
void
)
// unsigned char i;
Unsigned
char
butcount
=0;
Запустим проект в протеусе и увидим, что при нажатии на кнопку у нас начинает светиться самый верхний светодиод Казалось бы, что мы своей цели уже добились. Но чтобы сделать наш код более ответственным и совершенным, мы просто обязаны провести борьбу с дребезгом контактов, так как такое явление может иметь место, это только в протеусе всё идеально, на практике такое бывает не всегда. И чтобы это как-то отследить и определить, что это было именно нажатие, а не дребезг, то мы будим отслеживать нажатие некоторое время, ну или некоторое количество тактов или циклов. Для этого в начале функции main() до бесконечного цикла мы добавим другую переменную (i нам ещё пригодится и мы её портить не будем). Назовём мы переменную butcount
, так как имя переменной должно как-то само за себя говорить и тем самым достигается ещё большая читабельность кода // unsigned char i;
unsigned
char
butcount
=0;
И чтобы воспользоваться данной переменной, мы применим ещё одно условие. И у нас будет условие в условии. Это всё допустимо и очень широко используется. И в зависимости от этого условия мы данную переменную будем наращивать (инкрементировать). Условием будет у нас достижение данной переменной определённой величины. То есть попробуем сделать так, чтобы значение переменной не достигало 5
if
(!(
PINB
&0b00000001))
if
(
butcount
<
5)
{
butcount
++;
}
А когда значение данной переменной достигнет значения 5, то мы уже в данный цикл не попадём, а попадём мы в тело оператора else
, который мы сейчас и добавим и в его теле напишем следующий код
Butcount
++;
else
PORTD
=0b00000001;
То есть мы как раз после достижения пятёрки и будем обрабатывать нажатие кнопки и включать на нулевой ножке порта D высокое состояние. По идее, здесь мы должны обнулить нашу переменную, но мы это будем делать также постепенно, используя тело оператора else, только другого — того, который у нас был и тело которого выполняется при низком уровне на ножке, к которой подключена кнопка. Вот таким будет его тело else
if
(butcount
>0)
{
butcount
—;
}
else
{
PORTD
=0b00000000;
}
Данный код чем то похож на предыдущий, только здесь у нас идёт, наоборот декрементирование переменной, и как только её значение опять достигнет нуля, то мы и попадём в обработку отжатия кнопки, тем самым полностью избавимся от дребезга. И чем старее и некачественнее будет наша тактовая кнопка, тем большее значение переменной в условии мы будем применять. Давайте теперь соберём проект и проверим его работу сначала в протеусе, а затем и на практике. Выглядит это приблизительно так. Интереснее конечно это смотреть в видеоуроке Смотреть ВИДЕОУРОК Post Views:
13 084




 Меняем программу для открытия файлов в windows по умолчанию
Меняем программу для открытия файлов в windows по умолчанию Почему не загружается вк и браузер не заходит во вконтакте
Почему не загружается вк и браузер не заходит во вконтакте Распиновка USB на материнской плате: что, где и как
Распиновка USB на материнской плате: что, где и как Способы поиска информации в сети
Способы поиска информации в сети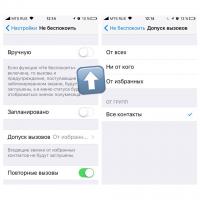 Как заблокировать номер телефона, чтобы не звонили
Как заблокировать номер телефона, чтобы не звонили Что делает процессор в играх Что менять видеокарту или процессор
Что делает процессор в играх Что менять видеокарту или процессор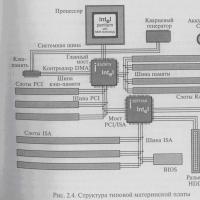 Какие разъёмы на материнской плате
Какие разъёмы на материнской плате