Что такое шим контроллер, как он устроен и работает, виды и схемы. Регулирование яркости светодиодов Что такое pwm сигнал
С аналоговым интегральным таймером SE555/NE555 (КР1006), выпускаемым компанией Signetics Corporation с далекого 1971 года прекрасно знакомо большинство советских и зарубежных радиолюбителей. Трудно перечислить, для каких только целей не использовалась эта недорогая, но многофункциональная микросхема за почти полувековой период своего существования. Однако, даже несмотря на быстрое развитие электронной промышленности в последние годы, она по-прежнему продолжает пользоваться популярностью и выпускается в значительных объемах.
Предлагаемая Jericho Uno простенькая схемка автомобильного ШИМ-регулятора – не профессиональная, полностью отлаженная разработка, отличающаяся своей безопасностью и надежностью. Это всего лишь небольшой дешевый эксперимент, собранный на доступных бюджетных деталях и вполне удовлетворяющий минимальным требованиям. Поэтому его разработчик не берет на себя ответственности за все то, что может произойти с вашим оборудованием при эксплуатации смоделированной схемы.
Схема ШИМ регулятор на NE555
Для создания ШИМ-устройства вам понадобится:- электропаяльник;
- микросхема NE555;
- переменный резистор на 100 кОм;
- резисторы на 47 Ом и 1 кОм по 0,5W;
- конденсатор на 0,1 мкФ;
- два диода 1N4148 (КД522Б).
Пошаговая сборка аналоговой схемы
Построение цепи начинаем с установки перемычек на микросхему. Используя паяльник, замыкаем между собой следующие контакты таймера: 2 и 6, 4 и 8.
Дальше, руководствуясь направлением движения электронов, распаиваем на переменном резисторе «плечи» диодного моста (проход тока в одну сторону). Номиналы диодов подобраны из имеющихся в наличие, недорогих. Можно заменить их любыми другими – это практически не повлияет на работу схемы.

Во избежание короткого замыкания и перегорания микросхемы при выкручивании переменного резистора в крайнее положение, ставим по питанию шунтирующее сопротивление в 1 кОм (контакты 7-8).

Поскольку NE555 выступает в роли генератора пилы, для получения схемы с заданной частотой, длительностью импульса и паузой, осталось подобрать резистор и конденсатор. Неслышных 18 кГц нам даст конденсатор 4,7 нФ, но такое малое значение емкости вызовет перекос плеч при работе микросхемы. Ставим оптимальную в 0,1 мкФ (контакты 1-2).

Избежать противного «пищания» схемы и подтянуть выход к высокому уровню можно чем-то низкоомным, например резистором 47-51 Ом.

Осталось подключить питание и нагрузку. Схема рассчитана на входное напряжение бортовой сети автомобиля 12V постоянного тока, но для наглядной демонстрации вполне запустится и от 9V батареи. Подключаем ее на вход микросхемы, соблюдая полярность (плюс на 8 ножку, минус на 1 ножку).

Осталось разобраться с нагрузкой. Как видно из графика, при понижении переменным резистором выходного напряжения до 6V пила на выходе (ножки 1-3) сохранилась, то есть NE555 в данной схеме и генератор пилы и компаратор одновременно. Ваш таймер работает в а-стабильном режиме и имеет коэффициент заполнения меньше 50%.

Модуль выдерживает 6-9 А проходного постоянного тока, так что при минимальных потерях можно подключить к нему как светодиодную полосу в автомобиле, так и маломощный двигатель, который и дым развеет и лицо в жару обдует. Примерно так:


Или так:


Принцип работы ШИМ регулятора
Работа ШИМ регулятора достаточно проста. Таймер NE555 отслеживает напряжение на емкости С. При ее заряде до достижения максимума (полный заряд) происходит открывание внутреннего транзистора и появлению логического нуля на выходе. Далее емкость разряжается, что приводит к закрытию транзистора и приходу к выходу логической единицы. При полном разряде емкости происходит переключение системы и все повторяется. В момент заряда ток идет по одному плечу, а при разряде – по-другому. Переменным резистором мы меняем соотношение сопротивления плеч, автоматически понижая либо увеличивая напряжение на выходе. В схеме наблюдается частичное отклонение частоты, но в слышимый диапазон она не попадает.Смотирте видео работы ШИМ регулятора
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простая схема управления двигателем постоянного тока
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.

Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет "воспринимать" среднее значение подводимой к нему энергии.
Схема для генерации ШИМ сигнала
Существует много схем для генерации ШИМ сигнала. Одна из самых простых - это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
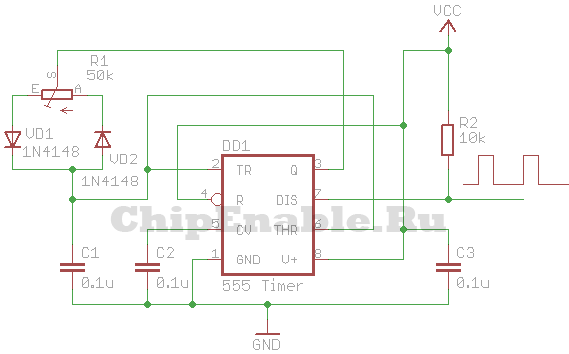
Напряжение питания схемы VCC может быть в диапазоне 5 - 16 Вольт. В качестве диодов VD1 - VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.

Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
ШИМ регулятор оборотов двигателя постоянного тока
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
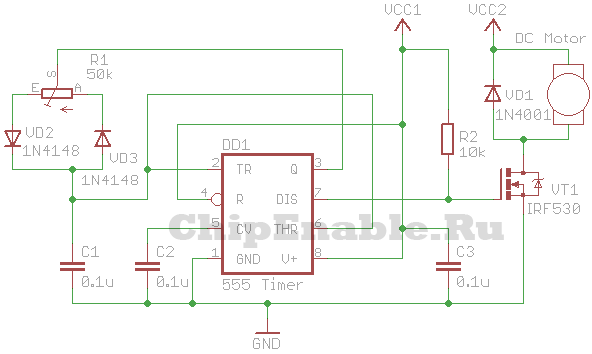
VT1 - полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
· СКМOFDM · COFDM · TCM
Широтно-импульсная модуляция (ШИМ, англ. Pulse-width modulation (PWM) ) - приближение желаемого сигнала (многоуровневого или непрерывного) к действительным бинарным сигналам (с двумя уровнями - вкл /выкл ), так, что, в среднем, за некоторый отрезок времени, их значения равны. Формально, это можно записать так:
,где x (t ) - желаемый входной сигнал в пределе от t1 до t2 , а ∆T i - продолжительность i -го ШИМ импульса, каждого с амплитудой A . ∆T i подбирается таким образом, что суммарные площади (энергии) обеих величин приблизительно равны за достаточно продолжительный промежуток времени, равны также и средние значения величин за период:
.Управляемыми "уровнями", как правило, являются параметры питания силовой установки, например, напряжение импульсных преобразователей /регуляторов постоянного напряжения/ или скорость электродвигателя. Для импульсных источников x (t ) = U const стабилизации.
Основной причиной внедрения ШИМ является сложность обеспечения произвольным Напряжение_(электрическое). Есть некое базовое постоянное напряжение питания (в сети, от аккумуляторов и пр.) и на его основе нужно получить более низкое произвольное и уже им запитывать электродвигатели или иное оборудование. Самый простой вариант - делитель напряжения , но он обладает пониженным КПД, повышенным выделением тепла и расходом энергии. Другой вариант - транзисторная схема. Она позволяет регулировать напряжение без использования механики. Проблема в том, что транзисторы греются больше всего в полуоткрытом состоянии (50%). И если с таким КПД ещё "можно жить", то выделение тепла, особенно в промышленных масштабах сводит всю идею на нет. Именно поэтому было решено использовать транзисторную схему, но только в пограничных состояниях (вкл/выкл), а полученный выход сглаживать LC-цепочкой (фильтром) при необходимости. Такой подход весьма энергоэффективен. ШИМ широко применяется повсеместно. Если вы читаете эту статью на LCD-мониторе (телефоне/КПК/... с LCD-подсветкой), то яркость подсветки регулируется ШИМ. На старых мониторах можно убавить яркость и услышать как ШИМ начинает пищать (очень тихий писк частотой в несколько килогерц). Так же "пищат" плавно мигающие LED-лампочки, например, в ноутбуках. Очень хорошо слышно пищание ШИМ по ночам в тишине.
В качестве ШИМ можно использовать даже COM-порт. Т.к. 0 передаётся как 0 0000 0000 1 (8 бит данных + старт/стоп), а 255 как 0 1111 1111 1, то диапазон выходных напряжений - 10-90% с шагом в 10%.
ШИП - широтно-импульсный преобразователь, генерирующий ШИМ-сигнал по заданному значению управляющего напряжения. Основное достоинство ШИП - высокий КПД его усилителей мощности, который достигается за счёт использования их исключительно в ключевом режиме. Это значительно уменьшает выделение мощности на силовом преобразователе (СП).
Применение
ШИМ использует транзисторы (могут быть и др. элементы) не в линейном, а в ключевом режиме, то есть транзистор всё время или разомкнут (выключен), или замкнут (находится в состоянии насыщения). В первом случае транзистор имеет почти бесконечное сопротивление, поэтому ток в цепи почти не течёт, и, хотя всё напряжение питания падает на транзисторе, то есть КПД=0 %, в абсолютном выражении выделяемая на транзисторе мощность равна нулю. Во втором случае сопротивление транзистора крайне мало, и, следовательно, падение напряжения на нём близко к нулю - выделяемая мощность так же мала.
Принцип работы ШИМ
ШИМ есть импульсный сигнал постоянной частоты и переменной скважности , то есть отношения периода следования импульса к его длительности. С помощью задания скважности (длительности импульсов) можно менять среднее напряжение на выходе ШИМ .
Генерируется аналоговым компаратором , на отрицательный вход которого подаётся опорный сигнал в виде «пилы» или «треугольника», а на положительный - собственно сам модулируемый непрерывный аналоговый сигнал. Частота импульсов соответствует частоте «зубьев» пилы. Ту часть периода, когда входной сигнал выше опорного, на выходе получается единица, ниже - нуль.
В цифровой технике, выходы которой могут принимать только одно из двух значений, приближение желаемого среднего уровня выхода при помощи ШИМ является совершенно естественным. Схема настолько же проста: пилообразный сигнал генерируется N -битным счётчиком. Цифровые устройства (ЦШИП) работают на фиксированной частоте, обычно намного превышающей реакцию управляемых установок (передискретизация ). В периоды между фронтами тактовых импульсов, выход ЦШИП остаётся стабильным, на нём действует либо низкий уровень либо высокий, в зависимости от выхода цифрового компаратора, сравнивающего значение счётчика с уровнем приближаемого цифрового сигнала V (n ). Выход за много тактов можно трактовать как череду импульсов с двумя возможными значениями 0 и 1, сменяющими друг-друга каждый такт Т . Частота появления единичных импульсов получается пропорциональной уровню приближаемого сигнала ~V (n ). Единицы, следующие одна за другой, формируют контур одного, более широкого импульса. Длительности полученных импульсов переменной ширины ~V (n ), кратны периоду тактирования T , а частота равна 1/(T *2 N ). Низкая частота означает длительные, относительно T , периоды постоянства сигнала одного уровня, что даёт невысокую равномерность распределения импульсов.
Описанная цифровая схема генерации подпадает под определение однобитной (двухуровневой) импульсно-кодовой модуляции (ИКМ ). 1-битную ИКМ можно рассматривать в терминах ШИМ как серию импульсов частотой 1/T и шириной 0 либо T . Добиться усреднения за менее короткий промежуток времени позволяет имеющаяся передискретизация. Высоким качеством обладает такая разновидность однобитной ИКМ, как импульсно-плотностная модуляция (pulse density modulation ), которая ещё именуется импульсно-частотной модуляцией .
Восстанавливается непрерывный аналоговый сигнал арифметическим усреднением импульсов за много периодов при помощи простейшего фильтра низких частот. Хотя обычно даже этого не требуется, так как электромеханические составляющие привода обладают индуктивностью, а объект управления (ОУ) - инерцией, импульсы с выхода ШИП сглаживаются и ОУ, при достаточной частоте ШИМ-сигнала, ведёт себя как при управлении обычным аналоговым сигналом.
См. также
- Векторная модуляция - векторная широтно-импульсная модуляция, используемая в силовой электронике.
- SACD - формат аудиодисков, использующий широтно-импульсную модуляцию звукового сигнала.
Производить регулировку скорости вращения вала коллекторного электродвигателя, имеющего малую мощность, можно подсоединяя последовательно в электроцепь его питания . Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения.
Основное, что этот способ временами приводит к полной остановке электродвигателя при низком напряжении питания. Регулятор оборотов электродвигателя постоянного тока, описанные в данной статье, не имеют эти недостатки. Данные схемы можно с успехом применять и для изменения яркости свечения ламп накаливания на 12 вольт.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).

Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на . Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.

Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:

Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов вращения электродвигателей
В данных схемах возможно применить следующие замены радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А возможно поменять КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 возможно поменять мощным полевым транзистором, например, IRF3905 или ему подобный.
Принцип ШИМ – широтно-импульсная модуляция заключается в изменении ширины импульса при постоянстве частоты следования импульса. Амплитуда импульсов при этом неизменна.
Широтно-импульсное регулирование находит применение там, где требуется регулировать подаваемую к нагрузке мощность. Например, в схемах управления электродвигателями постоянного тока, в импульсных преобразователях, для регулирования яркости светодиодных светильников, экранов ЖК-мониторов, дисплеев в смартфонах и планшетах и т.п.
Большинство вторичных источников питания электронных устройств в настоящее время строятся на основе импульсных преобразователей, применяется широтно-импульсная модуляция и в усилителях низкой (звуковой) частоты класса D, сварочных аппаратах, устройствах зарядки автомобильных аккумуляторов, инверторах и пр. ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
Широтно-импульсная модуляция бывает аналоговой и цифровой.
Аналоговая широтно-импульсная модуляция
Как уже упоминалось выше, частота сигнала и его амплитуда при ШИМ всегда постоянны. Один из важнейших параметров сигнала ШИМ – это коэффициент заполнения, равный отношению длительности импульса t к периоду импульса T . D = t/T . Так, если имеем сигнал ШИМ с длительностью импульса 300 мкс и периодом импульса 1000 мкс, коэффициент заполнения составит 300/1000 = 0,3. Коэффициент заполнения также выражается в процентах, для чего коэффициент заполнения умножается на 100%. По примеру выше процентный коэффициент заполнения составляет 0,3 х 100% = 30%.
Скважность импульса – это отношение периода импульсов к их длительности, т.е. величина, обратная коэффициенту заполнения. S = T/t .
Частота сигнала определяется как величина, обратная периоду импульса, и представляет собой количество полных импульсов за 1 секунду. Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F = 1/0,001 – 1000 (Гц).
Смысл ШИМ заключается в регулировании среднего значения напряжения путем изменения коэффициента заполнения. Среднее значение напряжения равно произведению коэффициента заполнения и амплитуды напряжения. Так, при коэффициенте заполнения 0,3 и амплитуде напряжения 12 В среднее значение напряжения составит 0,3 х 12 = 3,6 (В). При изменении коэффициента заполнения в теоретически возможных пределах от 0% до 100% напряжение будет изменяться от 0 до 12 В, т.е. Широтно-импульсная модуляция позволяет регулировать напряжение в пределах от 0 до амплитуды сигнала. Что и используется для регулирования скорости вращения электродвигателя постоянного тока или яркости свечения светильника.
Сигнал ШИМ формируется микроконтроллером или аналоговой схемой. Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В переходных состояниях на ключе присутствует значительное напряжение с прохождением значительного тока, т.е. значительна и рассеиваемая тепловая мощность. Поэтому в качестве ключа необходимо применение малоинерционных полупроводниковых приборов с быстрым временем переключения, порядка десятков наносекунд.
Если ключевая схема управляет светодиодом, то при малой частоте сигнала светодиод будет мигать в такт с изменением напряжения сигнала ШИМ. При частоте сигнала выше 50 Гц мигания сливаются вследствие инерции человеческого зрения. Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
При управлении посредством ШИМ скорости вращения двигателя постоянного тока частота ШИМ должна быть очень высокой, и лежать за пределами слышимых звуковых частот, т.е. превышать 15-20 кГц, в противном случае двигатель будет «звучать», издавая раздражающий слух писк с частотой ШИМ. От частоты зависит и стабильность работы двигателя. Низкочастотный сигнал ШИМ с невысоким коэффициентом заполнения приведет к нестабильной работе двигателя и даже возможной его остановке.
Тем самым, при управлении двигателем желательно повышать частоту сигнала ШИМ, но и здесь существует предел, определяемый инерционными свойствами полупроводникового ключа. Если ключ будет переключаться с запаздываниями, схема управления начнет работать с ошибками. Чтобы избежать потерь энергии и добиться высокого коэффициента полезного действия импульсного преобразователя, полупроводниковый ключ должен обладать высоким быстродействием и низким сопротивлением проводимости.
Сигнал с выхода ШИМ можно также усреднять посредством простейшего фильтра низких частот. Иногда можно обойтись и без этого, поскольку обладает определенной электрической индуктивностью и механической инерцией. Сглаживание сигналов ШИМ происходит естественным путем в том случае, когда частота ШИМ превосходит время реакции регулируемого устройства.
Реализовать ШИМ можно посредством с двумя входами, на один из которых подается периодический пилообразный или треугольный сигнал от вспомогательного генератора, а на другой модулирующий сигнал управления. Длительность положительной части импульса ШИМ определяется временем, в течение которого уровень управляющего сигнала, подаваемого на один вход компаратора, превышает уровень сигнала вспомогательного генератора, подаваемого на другой вход компаратора.
При напряжении вспомогательного генератора выше напряжения управляющего сигнала на выходе компаратора будет отрицательная часть импульса.
Коэффициент заполнения периодических прямоугольных сигналов на выходе компаратора, а тем самым и среднее напряжение регулятора, зависит от уровня модулирующего сигнала, а частота определяется частотой сигнала вспомогательного генератора.
Цифровая широтно-импульсная модуляция
Существует разновидность ШИМ, называемая цифровой ШИМ. В этом случае период сигнала заполняется прямоугольными подымпульсами, и регулируется уже количество подымпульсов в периоде, что и определяет среднюю величину сигнала за период.
![]()
В цифровой ШИМ заполняющие период подымпульсы (или «единички») могут стоять в любом месте периода. Среднее значение напряжения за период определяется только их количеством, при этом подымпульсы могут следовать один за другим и сливаться. Отдельно стоящие подымпульсы приводят к ужесточению режима работы ключа.
В качестве источника сигнала цифровой ШИМ можно использовать COM-порт компьютера с 10-битовым сигналом на выходе. С учетом 8 информационных битов и 2 битов старт/стоп, в сигнале COM-порта присутствует от 1 до 9 «единичек», что позволяет регулировать напряжение в пределах 10-90% напряжения питания с шагом в 10%.
 Как установить удаленный доступ к компьютеру: три простых способа
Как установить удаленный доступ к компьютеру: три простых способа Плагины для популярных cms яндекс
Плагины для популярных cms яндекс Счетная машина леонардо да винчи Леонардо да винчи вычислительная машина
Счетная машина леонардо да винчи Леонардо да винчи вычислительная машина 1с как настроить работу с одной организации
1с как настроить работу с одной организации 2 сервер какой выбрать язык
2 сервер какой выбрать язык Как очистить историю просмотров YouTube?
Как очистить историю просмотров YouTube? Простые способы разблокировки телефона
Простые способы разблокировки телефона